YASKAWA安川JANCD焊接 CPU控制 抱閘 跟蹤I/F基板銷售維修
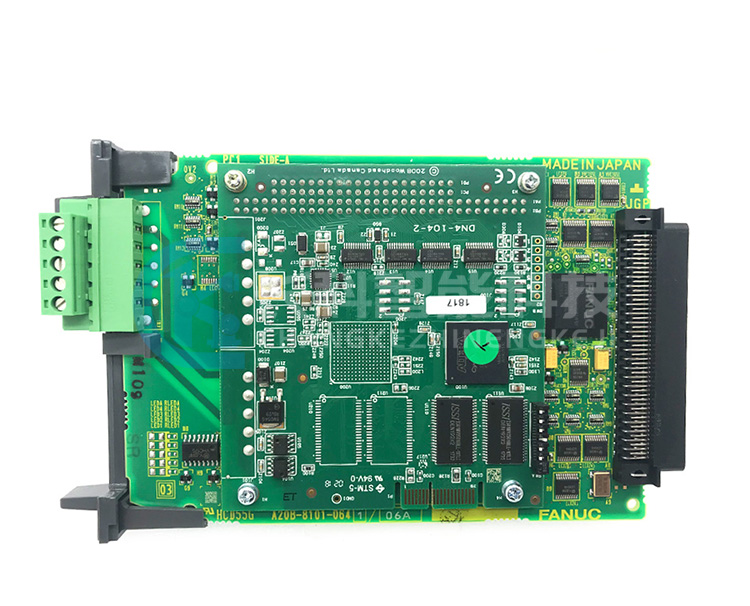
安川DX200機器人JANCD YEW01-E焊機接口基板
JANCD-YEW01-E焊接基板位于安川Motoman莫托曼機器人XRC控制柜內,是柜內核心部件之一。
安川機器人DX200 JANCD-YEW01-E焊接基板接口說明:
CN324:DC24V電源輸入接口;
CN323:DC24V電源輸出接口;
F1、F2:保險絲;
CN322:焊機連接接口;
CN321:始端檢測指令信號輸出接口;
S1:站設定開關;
CN320:I/O數據傳輸接口。
模擬輸出/輸入CH數:雙通道

安川JANCD-YEW01-E接點輸出回路:
接點輸出回路有焊機專用輸出4點(引弧、送絲、回絲、始端檢測指令(選項功能))和通用輸出1點。
安川JANCD-YEW01-E接點輸入回路:
接點輸入回路有焊機專用輸入4點(斷氣、斷絲、起弧確認、斷弧)。
YASKAWA安川機器人JANCD-XEW01焊接基板
YASKAWA安川機器人JANCD-XEW01-2焊接基板
YASKAWA安川機器人JANCD-XEW02焊接基板

YASKAWA安川NX100機器人JANCD-NCP01 CPU控制基板
YASKAWA安川NX100機器人JANCD-NCP01 CPU-1控制基板
YASKAWA安川NX100機器人CPU控制基板JANCD-YCP01-E

YASKAWA安川DX200機器人CPU控制基板JANCD-YCP21-E
YASKAWA安川機器人JANCD-YBK01-1E抱閘基板接口:
CN405:抱閘指令輸入插頭;
CN404:切換外部電源用插頭;
CN403:抱閘電源輸入插頭;
CN402:接觸器聯鎖輸入插頭;
CN400:抱閘輸出插頭;
F1:保險3A/250V
YASKAWA安川機器人JANCD-YBK01-2E抱閘基板

YASKAWA安川機器人整流器基板JANCD-XIF-03
YASKAWA安川機器人JANCD-YCP02-E跟蹤基板
YASKAWA安川機器人I/F基板JANCD-YIF01-4E
安川I/F基板JANCD-YIF01-4E更換步驟:
安川機器人I/F基板上保存有程序數據、參數等,所以,在更換之前必須進行數據備份。
第一步:將用于保存數據的CF卡插入示教編程器,然后在維護保養模式下進行啟動,選擇【外部存儲】→【保存】→“CMOS”(為慎重起見,推薦對數據進行個別備份)。
第二步:備份完成后,切斷電源。
第三步:卸掉所有連接在人I/F基板上的電線。
第四步:卸掉將I/F基板固定在支架上的兩處螺絲。
第五步:將I/F基板從支架上拔下。
第六步:沿著支架的凹槽插入新的I/F基板。
第七步:擰緊固定好上下螺絲。
第八步:安裝好所有被卸下的電線。
第九步:將旋轉開關設為與被更換I/F基板相同的值。
第十步:在維護保養模式下進行啟動,并將用于第一項中備份工作的CF卡插入安川示教編程器。然后將安全模式更改為管理模式,選擇【外部存儲】→【安裝】→【CMOS】,便會開始安裝數據。數據安裝結束后,便會恢復到更換I/F基板前的狀態。
YASKAWA安川DX200機器人通信基板JANCD-YSF21-E

YASKAWA安川DX200機器人安全IO邏輯基板JANCD-YSF22B-E接口:
CN219:機械安全端子臺基本I/F插頭;
地線連接端子;
CN218:PP I/F插頭;
CN217:連接器控制輸出插頭;
CN216:FANALM,FANCTL;
CN215:OT,SHOCK,LAMP;
CN214:基本軸控制基板I/F插頭;
CN211:I/O I/F插頭(與CPU單元的通信:1ch側);
CN212:I/O I/F插頭(與CPU單元的通信:2ch側);
S1/S2:旋轉開關;
CN213:控制電源輸入插頭;
F2:電源保護保險絲 2A/250V;
F2:電源保護保險絲 1A/250V。
相關產品
發那科R-30iB Mate Plus E-Stop急停板A20B-2103-0170 2024-12-26
庫卡C4機器人RDC編碼器盒00-217-812帶RDC板00246872 2024-12-20